- Created by John, last modified on Nov 08, 2022
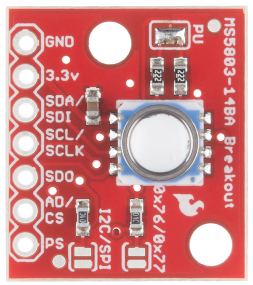
This is the MS5803-14BA Pressure Sensor Breakout, a high resolution pressure sensor with both an I2C and SPI interface. This MEMS pressure sensor measures the absolute pressure of the fluid around it which includes air, water, and anything else that acts like a viscous fluid. Depending on how you interpret the data, you can determine altitude, water depth, or any other tasks that require an accurate pressure reading. What makes the MS5803-14BA unique is the the gel membrane and antimagnetic stainless steel cap that protects against 30 bar water pressure (300 meters underwater).
We have broken out all the pins you need including GND and 3.3V for power, SDA/SDI and SCL/SCLK for an I2C interface and SD0, AD/CS, and PS for a SPI interface. The MS5803-14BA Breakout offers a resolution range of 1 / 0.6 / 0.4 / 0.3 / 0.2 mbar. Be aware that to switch between I2C and SPI interfaces a little bit of soldering between solder pads will be required, check the hookup guide below for more information.
Heads up! While the IC is capable of outputting data via I2C and SPI, the Arduino Library and example was only written to output via I2C! You'll need to modify the jumpers on the board for SPI mode by removing solder from the pull-up resistors jumper pads and close the other two jumpers. Additionally, you will need to write a library to communicate with the MS5803 in SPI mode if you plan on using this with Arduino.
Code for Reading Sensors and Computing Depth
// Read temp and pressure from the sensor
// TODO: Consider reducing the read frequency to reduce power consumption however, I do not think the sensor uses much power.
D1 = ms5803_cmd_adc( SENSOR_CMD_ADC_D1 + SENSOR_CMD_ADC_4096); // read uncompensated pressure
D2 = ms5803_cmd_adc( SENSOR_CMD_ADC_D2 + SENSOR_CMD_ADC_4096); // read uncompensated temperature
// calculate 1st order pressure and temperature correction factors (MS5803 1st order algorithm)
deltaTemp = D2 - sensorCoefficients[5] * pow( 2, 8 );
sensorOffset = sensorCoefficients[2] * pow( 2, 16 ) + ( deltaTemp * sensorCoefficients[4] ) / pow( 2, 7 );
sensitivity = sensorCoefficients[1] * pow( 2, 15 ) + ( deltaTemp * sensorCoefficients[3] ) / pow( 2, 8 );
// calculate 2nd order pressure and temperature (MS5803 2st order algorithm)
temperature = ( 2000 + (deltaTemp * sensorCoefficients[6] ) / pow( 2, 23 ) ) / 100;
pressure = ( ( ( ( D1 * sensitivity ) / pow( 2, 21 ) - sensorOffset) / pow( 2, 15 ) ) / 10 );
// The pressure at sea level is 1013.25 mbars so if the pressure is lower, then the user is not at sea level and an altitude compensation factor is needed.
// This needs to be improved to take the lowest reading since power up (not just the first reading above sea level) for situations when the unit does not power up until the user is in the water.
if ( pressure < 1013.25 && !altitudeCompSet ) {
altitudeCompensation = 1013.25 - pressure;
altitudeCompSet = true;
}
// calculate depth
if ( meters ) depth = ( ( pressure + altitudeCompensation ) - 1013.25 ) / 100.52; // There are 100.52 mbars per meter of depth.
else depth = ( ( pressure + altitudeCompensation ) - 1013.25 ) / 30.64; // There are 30.64 mbars per foot of depth.
// If there is a pressure rebound, make sure the depth does not go negative.
if ( depth < 0.0 ) depth = 0.0;
// Convert the temp to ferinheight if the user has selected that unit.
if ( ferinheight ) temperature = ( ( temperature * 9.0 ) / 5.0 ) + 32.0;
Full Code
/******************************************************************
* This is the Teensy 3.0 code for the DIY Dive Computer.
*
* Written by Victor Konshin.
* BSD license, check license.txt for more information.
* All text above must be included in any redistribution.
******************************************************************/
#include <Wire.h>
#include <EEPROM.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <SD.h>
#include "RTClib.h"
#include <Time.h>
#include "PITimer.h"
#include <Bounce.h>
#include <SPI.h>
//#include "UILibrary.h"
// Sensor constants:
#define SENSOR_CMD_RESET 0x1E
#define SENSOR_CMD_ADC_READ 0x00
#define SENSOR_CMD_ADC_CONV 0x40
#define SENSOR_CMD_ADC_D1 0x00
#define SENSOR_CMD_ADC_D2 0x10
#define SENSOR_CMD_ADC_256 0x00
#define SENSOR_CMD_ADC_512 0x02
#define SENSOR_CMD_ADC_1024 0x04
#define SENSOR_CMD_ADC_2048 0x06
#define SENSOR_CMD_ADC_4096 0x08
static unsigned char PROGMEM dive_logo_bmp[] =
{
B00011111, B11111111, B11111111,
B00001111, B11111111, B11111111,
B00000111, B11111111, B11111111,
B10000011, B11111111, B11111111,
B11000001, B11111111, B11111111,
B11100000, B11111111, B11111111,
B11110000, B01111111, B11111111,
B11111000, B00111111, B11111111,
B11111100, B00011111, B11111111,
B11111110, B00001111, B11111111,
B11111111, B00000111, B11111111,
B11111111, B10000011, B11111111,
B11111111, B11000001, B11111111,
B11111111, B11100000, B11111111,
B11111111, B11110000, B01111111,
B11111111, B11111000, B00111111,
B11111111, B11111100, B00011111,
B11111111, B11111110, B00001111,
B11111111, B11111111, B00000111,
B11111111, B11111111, B10000011,
B11111111, B11111111, B11000001,
B11111111, B11111111, B11100000,
B11111111, B11111111, B11110000,
B11111111, B11111111, B11111000 };
static unsigned char PROGMEM log_logo_bmp[] =
{
B00000100, B00000000, B00100000,
B00000111, B00000000, B11100000,
B00000111, B11000011, B11100000,
B00110111, B11100111, B11101100,
B00110111, B11100111, B11101100,
B00110111, B11100111, B11101100,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110111, B11100111, B11101101,
B10110011, B11100111, B11001101,
B10111110, B11100111, B01111101,
B10111111, B00100100, B11111101,
B10111111, B10100101, B11111101,
B11100001, B11000011, B10000111,
B11111111, B00100100, B11111111,
B11111111, B11000011, B11111111 };
static unsigned char PROGMEM settings_logo_bmp[] =
{
B00000000, B00000000, B00000000,
B00000000, B00000000, B00110000,
B00000000, B00000000, B11111100,
B00000000, B00000000, B11111100,
B00000000, B00000001, B11001110,
B00000000, B00000001, B11001110,
B00000000, B11000000, B11111100,
B00010001, B11100010, B11111100,
B00111001, B11100111, B00110000,
B01111111, B11111111, B10000000,
B00111111, B11111111, B00000000,
B00011111, B11111110, B00000000,
B00011111, B00111110, B00000000,
B01111110, B00011111, B10000000,
B11111100, B00001111, B11000000,
B11111100, B00001111, B11000000,
B01111110, B00011111, B10000000,
B00011111, B00111110, B00000000,
B00011111, B11111110, B00000000,
B00111111, B11111111, B00000000,
B01111111, B11111111, B10000000,
B00111001, B11100111, B00000000,
B00010001, B11100010, B00000000,
B00000000, B11000000, B00000000 };
static unsigned char PROGMEM up_arrow[] =
{
B00011000,
B00111100,
B01111110,
B11111111 };
static String PROGMEM months[] = {
"???", "Jan", "Feb", "Mar", "Apr", "May", "Jun", "Jul", "Aug", "Sep", "Oct", "Nov", "Dec" };
static unsigned int accent_tone[] = { // Structure: # of tones then frequencies
4, 1000, 1200, 1400, 1600
};
static unsigned int trill_tone[] = { // Structure: # of tones then frequencies
4, 1000, 1400, 1000, 1400
};
//#define SHOW_LAYOUT // Uncomment this to see bounding boxes on UI elements - makes laying out items easier.
// **************************************** Sensor Parameters *****
unsigned int sensorCoefficients[8]; // calibration coefficients
unsigned long D1 = 0; // Stores uncompensated pressure value
unsigned long D2 = 0; // Stores uncompensated temperature value
float pressure = 0; // Stores actual pressure in mbars
float temperature = 0; // Stores actual temp in degrees C.
float deltaTemp = 0;
float sensorOffset = 0;
float sensitivity = 0;
// **************************************** Hardware Parameters *****
const int button1Pin = 0; // Pin for the right button.
const int button2Pin = 1; // Pin for the left button.
const int button3Pin = 2; // Pin for a third button - the inital design will not use it but I will have parts on the board to support it.
const int button4Pin = 3; // Pin for a fourth button - the inital design will not use it but I will have parts on the board to support it.
const int oledReset = 4; // Pin for the OLED reset.
const int alertLEDPin = 5; // A blinking LED is attached to this pin.
const int chargingPin = 6; // Pin for receiving the charging signal from the charging circuit.
const int sensorSelectPin = 9; // Sensor device select
const int sdChipSelect = 10; // For the SD card breakout board
const int batteryLevelPin = A0; // Pin for monitoring the battery voltage.
const int wakeUpPin = A1; // Pin for water wake up.
const int speakerPin = A8; // Pin for the piezo speaker (PWM out).
const int fakeDepthPin = A9; // Connect a potentiameter to this pin for testing and debugging
const int profileSize = 89; // The number of depths that are saved to EEPROM for the dive profile graph.
Sd2Card card;
SdVolume volume;
SdFile root;
// **************************************** System Parameters *****
Adafruit_SSD1306 display(oledReset); // Allocate for the OLED
unsigned long currentTime = 0; // Stores the current date/time for use throughout the code.
int batteryLevel = 128; // Current battery capacity remaining.
int displayMode = 0; // Stores the current display mode: 0 = menu, 1 = dive, 2 = log, 3 = settings.
int currentMenuOption = 0; // Stores which menu option is being displayed. 0 = dive, 1 = log, 2 = settings.
int diveModeDisplay = 0; // There are multiple dive mode displays. This is the one currently being viewed.
float altitudeCompensation = 0.0f; // The altitude compensation factor. If the user is above sea level, this stored the difference between air pressure and sea level pressure.
boolean altitudeCompSet = false; // Set this to true when the altitudeCompensation variable gets set (locked in).
unsigned long lLastDebounceTime = 0; // the last time the output pin was toggled
unsigned long rLastDebounceTime = 0; // the last time the output pin was toggled
int debounceDelay = 300; // the debounce time; increase if the output flickers
boolean accentBlink = false; // Store for the accent indicator blink state.
boolean batteryBlink = false; // Store for the battery indicator blink state.
boolean safetyStopBlinkState = false; // Store for the safety stop blink state.
boolean inWater = false; // Goes true if the water sensor detects that the device is submerged.
int inWaterCounter = 0; // Counter used to determine if the device is in water.
boolean alertShowing = false; // true = there is an alert showing.
uint32_t alertTime = 0; // Stores time the alert was displayed.
uint32_t lastDataRecord = 0; // Stores the last time data was recorded in unixtime.
uint32_t lastColonStateChange = 0; // Stores the last time the clock was updates to that the blink will happen at 1Hz.
uint32_t lastProfileRecord = 0; // The real time that the last profile record was saved.
uint32_t safetyStopBlink = 0; // Stores the last time the safety stop banner was updates to that the blink will happen at 1Hz
const int numberOfDiveDisplays = 3; // The number of dive displays (zero based).
int toneCounter = 0; // Store the current tone being played in the tone sequence.
boolean toneActive = false; // Set true to play a tone.
int tonePlaying = 0; // The ID of the tone to play (0 = accent to fast, 1 = trill).
const int accentSamples = 10; // Number of depth samples to store for accent rate calculations.
boolean safetyStopNeeded = false; // Goes true when the user's depth surpasses requireSafetyStopAfter.
boolean safetyStop = false; // When true the safety stop screen is shown.
uint32_t safetyStopTime = 0; // Stores the time the safety stop started.
char currentDataFile[] = "00000000.txt"; // This is the name of the current data file.
// **************************************** Dive parameter storage *****
boolean diveMode = false; // Stores dive mode or surface mode state: 0 = surface mode, 1 = dive mode.
uint32_t diveStart = 0; // This stores the dive start time in unixtime.
int diveTime = 0; // This stores the current dive time in seconds
float depth = 0.0f; // Current Depth
int maxDepth = 0; // Max Depth
int nitrogen = 0; // Current nitrogen saturation level
int oxygen = 0; // Current oxygen saturation level.
float depths[accentSamples]; // Stores the last 10 depth reading.
unsigned long depthMicros[accentSamples]; // Stores the times of the last ten depth readings (to calculate accent rate).
int profilePointer = 0; // The computer saves depth data to EEPROM for the graph function. This is the pointer to the current location data is being saved.
int profileSamples = 0; // Number of samples collected (when less than the max).
int depthsPointer = 0; // Pointer for the depths and depthMicros variables.
float accentRate = 0; // This will go away when accent rate is calculated from recent pressure readings.
// **************************************** User Preferences *****
boolean time12Hour = true; // true = 12 hour time, false = 24 hour time.
boolean clockBlink = true; // true = blink the colon, false = don't blink the colon.
boolean ferinheight = true; // true = Ferinheight, false = Celsius.
boolean meters = false; // true = meters, false = feet.
boolean doubleAccentBelowRec = true; // True = 60ft/min accent rate below recreational limits (130ft). 30ft/min otherwise.
int recordInterval = 10; // This is the inteval in which it will record data to the SD card in minutes.
int profileInterval = 0; // The interval that dive profile depths are recorded to EEPROM (for the graphing funtion).
boolean playAccentTooFastTone = true; // If this is true, then the accent too fast tone will play.
float requireSafetyStopAfter = 30.0; // The depth the user needs to pass for the safety stop to be enabled;
int safetyStopLength = 180; // Length of the standard safety stop.
// ***************************************************************
// ****************************************************************************
// Setup
// ****************************************************************************
void setup() {
// Read the preferenced from the EEPROM
readPrefereces();
// Start the serial ports.
Serial.begin( 115200 );
Wire.begin();
// Display Setup
display.begin( SSD1306_SWITCHCAPVCC, 0x3D ); // initialize with the I2C addr 0x3D
display.display(); // show splashscreen
delay( 1000 );
display.clearDisplay();
display.display();
display.setTextColor( WHITE );
// Set up the warning LED Pin
pinMode( alertLEDPin, OUTPUT ); // Warning LED
digitalWrite( alertLEDPin, HIGH );
// Set up the SD card pin select
pinMode( sdChipSelect, OUTPUT );
digitalWrite( sdChipSelect, HIGH );
// Set pins for charging detection
pinMode( chargingPin, INPUT );
// Set up the sensor SPI select Pin
pinMode( sensorSelectPin, OUTPUT );
digitalWrite( sensorSelectPin, HIGH );
SPI.begin(); //see SPI library details on arduino.cc for details
SPI.setBitOrder( MSBFIRST );
SPI.setClockDivider( SPI_CLOCK_DIV2 );
delay( 10 );
// Read sensor coefficients - these will be used to convert sensor data into pressure and temp data
ms5803_reset_sensor(); // resetting the sensor on startup is impoortant
for (int i = 0; i < 8; i++ ){
sensorCoefficients[ i ] = ms5803_read_coefficient( i ); // read coefficients
delay(10);
}
// Check the CRC data returned from the sensor to ensure data integrity.
unsigned char n_crc;
unsigned char p_crc = sensorCoefficients[ 7 ];
n_crc = ms5803_crc4( sensorCoefficients ); // calculate the CRC
// If the calculated CRC does not match the returned CRC, then there is a data integrity issue.
// Check the connections for bad solder joints or "flakey" cables. If this issue persists, you may have a bad sensor.
if ( p_crc != n_crc ) {
showAlert ( 0, "The sensor CRC check failed. There is a data integrity issue with the sensor." );
}
// Setup the user input buttons.
pinMode( button1Pin, INPUT_PULLUP ); // right button
pinMode( button2Pin, INPUT_PULLUP ); // left button
attachInterrupt( button1Pin, rightPressed, FALLING );
attachInterrupt( button2Pin, leftPressed, FALLING );
// Wake up pin is also the "in water" pin
pinMode( wakeUpPin, INPUT );
// initialize access to the SD card
Serial.print( "Initializing SD card..." );
// make sure that the default chip select pin is set to
// output, even if you don't use it:
// see if the card is present and can be initialized:
if ( !SD.begin( sdChipSelect ) ) {
Serial.println( "Card failed, or not present" );
// don't do anything more:
showAlert( 0, "Failed to initialize the SD card. Please make sure the card isinstalled correctly." );
}
else {
Serial.println( "card initialized." );
}
//showAlert (0, "You are severly bent and about to die. Youshould surface while you still can.");
// Was a nice idea but it seems that these timers interfere with other things happening...
// PITimer0.period(.1);
// PITimer0.start(cycleTone);
// Give everything a half sec to settle
delay( 500 );
// Make sure the real time clock is set correctly and set some inital parameters
Teensy3Clock.set( 0 );//DateTime( __DATE__, __TIME__ ).unixtime() ); // comment out if there is a backup battery connected to the real time clock.
currentTime = Teensy3Clock.get();
lastDataRecord = currentTime;
lastColonStateChange = currentTime;
diveStart = currentTime;
}
// ****************************************************************************
// ****************************************************************************
// Main Loop
// ****************************************************************************
// ****************************************************************************
void loop() {
// If there is an active tone, then play the next in the sequence.
cycleTone();
// Fake values for debugging
nitrogen++;
oxygen++;
if ( nitrogen > 255 ) nitrogen = 0;
if ( oxygen > 255 ) oxygen = 0;
// Read real time clock.
currentTime = Teensy3Clock.get();
// Read temp and pressure from the sensor
// TODO: Consider reducing the read frequency to reduce power consumption however, I do not think the sensor uses much power.
D1 = ms5803_cmd_adc( SENSOR_CMD_ADC_D1 + SENSOR_CMD_ADC_4096); // read uncompensated pressure
D2 = ms5803_cmd_adc( SENSOR_CMD_ADC_D2 + SENSOR_CMD_ADC_4096); // read uncompensated temperature
// calculate 1st order pressure and temperature correction factors (MS5803 1st order algorithm)
deltaTemp = D2 - sensorCoefficients[5] * pow( 2, 8 );
sensorOffset = sensorCoefficients[2] * pow( 2, 16 ) + ( deltaTemp * sensorCoefficients[4] ) / pow( 2, 7 );
sensitivity = sensorCoefficients[1] * pow( 2, 15 ) + ( deltaTemp * sensorCoefficients[3] ) / pow( 2, 8 );
// calculate 2nd order pressure and temperature (MS5803 2st order algorithm)
temperature = ( 2000 + (deltaTemp * sensorCoefficients[6] ) / pow( 2, 23 ) ) / 100;
pressure = ( ( ( ( D1 * sensitivity ) / pow( 2, 21 ) - sensorOffset) / pow( 2, 15 ) ) / 10 );
// The pressure at sea level is 1013.25 mbars so if the pressure is lower, then the user is not at sea level and an altitude compensation factor is needed.
// This needs to be improved to take the lowest reading since power up (not just the first reading above sea level) for situations when the unit does not power up until the user is in the water.
if ( pressure < 1013.25 && !altitudeCompSet ) {
altitudeCompensation = 1013.25 - pressure;
altitudeCompSet = true;
}
// calculate depth
if ( meters ) depth = ( ( pressure + altitudeCompensation ) - 1013.25 ) / 100.52; // There are 100.52 mbars per meter of depth.
else depth = ( ( pressure + altitudeCompensation ) - 1013.25 ) / 30.64; // There are 30.64 mbars per foot of depth.
// If there is a pressure rebound, make sure the depth does not go negative.
if ( depth < 0.0 ) depth = 0.0;
// Convert the temp to ferinheight if the user has selected that unit.
if ( ferinheight ) temperature = ( ( temperature * 9.0 ) / 5.0 ) + 32.0;
// This code will read a potentiometer and over ride the depth reading of the sensor if it is larger than the sensor's reading. This is used for testing and debugging.
float fakeDepthReading = analogRead(fakeDepthPin) / 30.0f;
if (fakeDepthReading > depth) depth = fakeDepthReading;
// Records a round robin buffer of depth readings for accent rate calculations.
depths[depthsPointer] = depth;
depthMicros[depthsPointer] = micros();
depthsPointer++;
if (depthsPointer > accentSamples) depthsPointer = 0;
// Set Max Depth
if ( depth > maxDepth ) maxDepth = depth;
// Enable safety stop.
if ( depth > requireSafetyStopAfter ) {
safetyStopNeeded = true;
safetyStop = false;
}
// If the user accents to safety stop levels, then start the safety stop.
if ( safetyStopNeeded && depth < ( requireSafetyStopAfter - 10.0 ) && !safetyStop ) {
safetyStop = true;
safetyStopTime = now() + safetyStopLength; // add 3 minutes.
}
if ( depth < requireSafetyStopAfter && safetyStop && safetyStopTime < now() ) {
safetyStopNeeded = false;
safetyStop = false;
}
// Fake battery level for testing.
// batteryLevel -= 1;
// if (batteryLevel < 0) batteryLevel = 255;
// In water detection. This will tell if the user is in the water. Not exactly sure what it will be used for at this point but the code is here.
if ( analogRead(A1) == 0 ) inWaterCounter++;
else inWaterCounter--;
if ( inWaterCounter > 100 ) {
inWater = true;
if ( inWaterCounter > 150 ) inWaterCounter = 150;
}
if ( inWaterCounter < 0 ) {
inWater = false;
inWaterCounter = 0;
}
// Dive start detection. When the user decends below 4 feet, then the dive will start.
if ( diveMode == false && depth > 4.0 ) {
diveMode = true; // Set global "dive/surface" mode flag
diveStart = now(); // reset the dive timer.
diveTime = 0;
maxDepth = 0; // reset the max depth.
inWater = true; // If you are 4 feet under water, it's safe to assume that you are in the water, if this flag has not already been set...
inWaterCounter = 150;
displayMode = 1; // Since this conditional is only called when a dive starts, put the display into dive mode if it isn't already.
clearDiveProfile();
setupNewDataFile();
}
// TODO: Probably need something similar to the inWaterCounter to prevent multiple dive start records if the user is hanging out between 3 and 4 feet.
if ( diveMode == true && depth < 4.0 ) {
diveMode = false;
safetyStopNeeded = false;
safetyStop = false;
}
Serial.print("Depth = ");
Serial.print(depth);
Serial.print(" diveMode = ");
Serial.println(diveMode);
// Things to do when in dive mode.
if ( diveMode ) {
diveTime = now() - diveStart;
logData(); // Data will only log when (diveTime % recordInterval == 0)
recordDiveProfileValue();
// TODO: Calculate nitrogen
// TODO: Calculate oxygen
}
// Calculate the accent rate. This is where the LED gets activated and alert tone gets initiated.
calculateAccentRate();
// if there is no alert condition then show the normal display.
// TODO: The way this is currently written, the display is constantly being updated. This is not efficient.
// TODO: Need to change this so only areas of the screen that need updating are updated. This will likely improve battery performance.
if ( !alertShowing ) {
display.clearDisplay();
display.setTextColor( WHITE );
// 0 = menu, 1 = dive, 2 = log, 3 = settings
if ( displayMode == 0 ) { // Menu Display
drawMenu();
}
else if ( displayMode == 1 ) { // Dive Display
// TODO: Make it easier to add dive display modes.
if ( safetyStop ) {
drawSafetyStopScreen();
}
else {
if ( diveModeDisplay == 0 ) {
drawDiveDisplayA();
}
else if ( diveModeDisplay == 1 ) {
drawDiveDisplayB();
}
else if ( diveModeDisplay == 2 ) {
drawDiveDisplayC(); // TODO: add a low power view - a view that has the minimum number of "on" pixels. OLED displays only power on pixels. Consider reducing sensor read freq for this view.
}
else {
drawDiveDisplayD();
}
}
}
else if ( displayMode == 2 ) { // Log Book Display
drawLogBook();
}
else if ( displayMode == 3 ) { // Settings Display
drawSettings();
}
display.display();
}
}
// ****************************************************************************
// Main Menu
// ****************************************************************************
void drawMenu() {
display.setTextColor( WHITE );
display.setTextSize( 1 );
if ( currentMenuOption == 0 ) {
display.setCursor( 37, 44 );
display.println( "Dive Mode" );
display.drawBitmap( 52, 16, dive_logo_bmp, 24, 24, WHITE );
}
else if ( currentMenuOption == 1 ) {
display.setCursor( 40, 44 );
display.println( "View Log" );
display.drawBitmap( 52, 16, log_logo_bmp, 24, 24, WHITE );
}
else if ( currentMenuOption == 2 ) {
display.setCursor( 40, 44 );
display.println( "Settings" );
display.drawBitmap( 52, 16, settings_logo_bmp, 24, 24, WHITE );
}
display.fillRect( 0, 0, 128, 9, WHITE );
display.setTextColor( BLACK );
display.setCursor( 36, 1 );
display.setTextSize( 1 );
display.println( "MAIN MENU:" );
drawButtonOptions( "SEL", ">>", true, true );
display.setTextColor( WHITE );
// Show essensial data if the user is in dive mode.
if ( diveMode ) {
drawDepth( depth, 0, 26, 9, 1, true, "Depth:" ); // Parameters: depth, x, y, size, bold, header string
drawAccentRateArrows( 120, 20 ); // Parameters: x, y
}
}
// ****************************************************************************
// User Interactions
// ****************************************************************************
void rightPressed() {
// TODO: Replace debounce code with Debounce library since it provides more functionality.
if ( ( millis() - rLastDebounceTime ) < debounceDelay ) {
return;
}
rLastDebounceTime = millis();
if ( alertShowing ) {
killAlert();
return;
}
if ( displayMode == 0 ) { // Menu
currentMenuOption ++;
if ( currentMenuOption > 2 ) currentMenuOption = 0;
}
if ( displayMode == 1 ) { // Dive
diveModeDisplay++;
if ( diveModeDisplay > numberOfDiveDisplays ) diveModeDisplay = 0;
}
}
void leftPressed() {
// TODO: Replace debounce code with Debounce library since it provides more functionality.
if ( ( millis() - lLastDebounceTime ) < debounceDelay ) {
return;
}
lLastDebounceTime = millis();
if ( displayMode == 0 ) { // Menu
displayMode = currentMenuOption + 1;
return;
}
if ( displayMode == 1 ) { // Dive
displayMode = 0;
return;
}
if ( displayMode == 2 ) { // Log
displayMode = 0;
return;
}
if ( displayMode == 3 ) { // Settings
displayMode = 0;
writePreferences(); // save the preferences to the EEPROM
return;
}
}
// ****************************************************************************
// Dive Mode Displays
// ****************************************************************************
void drawDiveDisplayA() {
drawDiveTime( diveTime, 62, 0, 9, 2, false, "Dive Time:" ); // Parameters: Time in seconds, x, y, size, bold
drawDepth( maxDepth, 14, 31, 9, 2, false, "Max:" ); // Parameters: depth, x, y, size, bold, header string
drawDepth( depth, 6, 0, 9, 3, true, "Depth:" ); // Parameters: depth, x, y, size, bold, header string
drawAccentRateBars( 71, 24 );
drawAccentRate( 70, 45, 1, true, true );
drawSaturation( nitrogen, true );
drawSaturation( oxygen, false );
drawButtonOptions( "^^", ">>", true, true );
}
void drawDiveDisplayB() {
drawDiveTime( diveTime, 56, 28, 9, 2, false, "Dive Time:" ); // Parameters: Time in seconds, x, y, heading offset, size, bold
drawDepth( maxDepth, 10, 28, 9, 2, false, "Max:" ); // Parameters: depth, x, y, heading offset, size, bold, header string
drawDepth( depth, 10, 2, 9, 2, true, "Depth:" ); // Parameters: depth, x, y, heading offset, size, bold, header string
drawAccentRateArrows( 96, 0 ); // Parameters: x, y
drawSaturation( nitrogen, true ); // Parameters: value and a boolean to indicate nitrogen or oxygen (true = nitrogen, false = oxygen)
drawSaturation( oxygen, false ); // Parameters: value and a boolean to indicate nitrogen or oxygen (true = nitrogen, false = oxygen)
drawButtonOptions( "^^", ">>", true, true ); // Draws the button bar at the bottom of the screen. Parameters: Left button title, right button title, show time/temp bar, show battery.
}
// ++++++ DEPTH ONLY ++++++
void drawDiveDisplayC() {
drawDepth( depth, 20, 0, 13, 5, true, "Depth:" ); // Parameters: depth, x, y, heading offset, size, bold, header string
drawAccentRateArrows( 110, 16 ); // Parameters: x, y
drawSaturation( nitrogen, true ); // Parameters: value and a boolean to indicate nitrogen or oxygen (true = nitrogen, false = oxygen)
drawSaturation( oxygen, false ); // Parameters: value and a boolean to indicate nitrogen or oxygen (true = nitrogen, false = oxygen)
drawButtonOptions( "^^", ">>", false, true ); // Draws the button bar at the bottom of the screen. Parameters: Left button title, right button title, show time/temp bar, show battery.
}
// ++++++ Dive Profile View ++++++
void drawDiveDisplayD() {
drawDiveProfileGraph( 0, 0 );
drawDepth( depth, 91, 0, 9, 1, true, "Depth:" ); // Parameters: depth, x, y, heading offset, size, bold, header string
drawAccentRateArrows( 120, 22 ); // Parameters: x, y
drawButtonOptions( "^^", ">>", true, true ); // Draws the button bar at the bottom of the screen. Parameters: Left button title, right button title, show time/temp bar, show battery.
}
// ****************************************************************************
// Record Data
// ****************************************************************************
void createFileName( int diveNumber ) {
int currentYear = year();
if (currentYear < 2000) currentYear = 2013; // If the clock is not set, then use 2013.
currentDataFile[0] = (currentYear - 2000 ) / 10 + '0'; // File name format: YYMMDD##.txt
currentDataFile[1] = currentYear % 10 + '0';
currentDataFile[2] = month() / 10 + '0';
currentDataFile[3] = month() % 10 + '0';
currentDataFile[4] = day() / 10 + '0';
currentDataFile[5] = day() % 10 + '0';
currentDataFile[6] = diveNumber / 10;
currentDataFile[7] = diveNumber % 10;
// currentDataFile[8] = '.';
// currentDataFile[9] = 't';
// currentDataFile[10] = 'x';
// currentDataFile[11] = 't';
// Debug
Serial.println( currentDataFile );
}
void setupNewDataFile() {
int diveNumber = 1;
createFileName( diveNumber );
// for ( int x = 0; x < nameLength; x++ ) {
// fileName[x] = currentDataFile[x];
// }
while ( SD.exists( currentDataFile ) ) {
diveNumber++;
createFileName( diveNumber );
}
}
void logData() {
// ************* Data logging code *************
//Serial.print("lastDataRecord = ");
//Serial.println(lastDataRecord);
//
//Serial.print("now = ");
//Serial.println(now());
if ( now() > ( lastDataRecord + recordInterval ) ) {
lastDataRecord = now();
// make a string of data to log:
String dataString = generateRecordDataString();
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
File dataFile = SD.open( currentDataFile, FILE_WRITE );
// if the file is available, write to it:
if ( dataFile ) {
dataFile.println( dataString );
dataFile.close();
// print to the serial port:
//Serial.print("Logging Data: ");
//Serial.println(dataString);
}
else {
Serial.println( "error opening datalog.txt" );
showAlert( 0, "Error opening data log file. Check the SD card." );
}
}
}
String generateRecordDataString() {
String returnString = "Nitrogen: ";
returnString += String( nitrogen );
return returnString;
}
void drawButtonOptions( String left, String right, boolean showTimeTemp, boolean showBattery ) {
int leftWidth = ( left.length() * 6 ) - 1;
int rightWidth = ( right.length() * 6 ) - 1;
display.fillRect( 0, 55, leftWidth + 2, 9, WHITE );
display.setTextColor( BLACK );
display.setCursor( 1, 56 );
display.setTextSize( 1 );
display.println( left );
display.fillRect( 128 - ( rightWidth + 2 ), 55, rightWidth + 2, 9, WHITE );
display.setTextColor( BLACK );
display.setCursor( 128 - ( rightWidth + 1 ), 56 );
display.setTextSize( 1 );
display.println( right );
// (leftWidth + rightWidth + 4);
if ( showTimeTemp ) {
drawTimeTempBar( leftWidth + 3, 55, 128 - ( ( leftWidth + 3 ) + ( rightWidth + 3 ) ) , showBattery );
}
else if ( showBattery ) {
// TODO: This this appropiately dynamic.
drawBattery( 54, 56, 20, false ); // if color = false, battey is white, true = black battery.
}
}
// ****************************************************************************
// Draw Saturation
// ****************************************************************************
void drawSaturation( int value, boolean nitrogen ) {
float level = ( 47.0 / 255.0 ) * value;
display.setTextSize( 1 );
int x = 0;
display.setTextColor( WHITE );
if ( nitrogen ) {
display.setCursor( 0, 47 );
display.println( "N" );
}
else {
display.setCursor( 122, 47 );
display.println( "O" );
x = 122;
}
display.fillRect( x, 47 - level, 5, level, WHITE );
}
// ****************************************************************************
// Draw Dive Time
// ****************************************************************************
// Good up to 99 min and 99 sec. Font sizes 1-4 are valid
void drawDiveTime(unsigned long seconds, int x, int y, int headingGap, int size, boolean bold, String heading) {
String timeString = secondsToString( seconds );
int width = ( ( 6 * 5 ) * size ) - size;
int height = ( 7 * size ) + headingGap;
if ( width < 59 ) width = 59;
display.setCursor( ( ( width - ( heading.length() * 6 ) ) / 2) + x, y );
display.setTextSize( 1 );
display.println( heading );
display.setTextSize( size );
if ( width > 59 ) {
display.setCursor( x, y + headingGap );
}
else {
display.setCursor( ( ( width - ( ( 6 * 5 ) * size ) ) / 2 ) + x, y + headingGap);
}
display.print( timeString );
if ( bold ) {
if ( width > 59 ) {
display.setCursor( x + 1, y + headingGap );
}
else {
display.setCursor( ( ( width - ( ( 6 * 5 ) * size ) ) / 2 ) + x + 1, y + headingGap);
}
display.print( timeString );
}
#ifdef SHOW_LAYOUT
display.drawRect( x, y, width, height, WHITE );
#endif
}
// ****************************************************************************
// Draw Clock
// ****************************************************************************
void drawClock( int x, int y, int headingGap, int size, boolean bold ) {
String timeString = createTimeString( false );
int width = ( ( 6 * timeString.length()) * size) - size;
int height = ( 7 * size ) + headingGap;
if ( width < 29 ) width = 29;
display.setCursor( ( ( width - 29 ) / 2) + x, y );
display.setTextSize(1);
display.println("Time:");
display.setTextSize( size );
if ( width > 29 ) {
display.setCursor( x, y + headingGap );
}
else {
display.setCursor( ( ( width - ( ( 6 * 5 ) * size ) ) / 2 ) + x, y + headingGap );
}
display.print( timeString );
if ( bold ) {
if ( width > 29 ) {
display.setCursor( x + 1, y + headingGap );
}
else {
display.setCursor( ( ( width - ( ( 6 * 5 ) * size ) ) / 2 ) + x + 1, y + headingGap );
}
display.print( timeString );
}
#ifdef SHOW_LAYOUT
display.drawRect( x, y, width, height, WHITE );
#endif
}
String createTimeString(boolean amPm) {
String timeString;
int hours = hour();
if ( time12Hour ) {
if ( hour() > 12 ) {
hours -= 12;
}
if (hours == 0) {
hours = 12;
}
}
if ( hours < 10 ) {
timeString = " ";
timeString = String( timeString + hours );
}
else {
timeString = String( hours );
}
if ( now() > lastColonStateChange ) {
lastColonStateChange = now();
clockBlink = !clockBlink;
}
if ( clockBlink ) {
timeString = String( timeString + ':' );
}
else {
timeString = String( timeString + ' ' );
}
int minutes = minute();
if ( minutes < 10 ) {
timeString = String( timeString + '0' );
}
timeString = String( timeString + minutes );
if ( time12Hour ) {
if ( hour() > 11 ) {
timeString = String( timeString + "PM" );
}
else {
timeString = String( timeString + "AM" );
}
}
timeString.replace( '0', 'O' );
return timeString;
}
// ****************************************************************************
// Draw Temp
// ****************************************************************************
// Good up to three digits. Sizes 1-4 are valid
void drawTemp( int x, int y, int headingGap, int size, boolean bold ) {
int headerLength = 5; // "Temp:"
int headerWidth = ( 6 * headerLength );
int width = ( ( 6 * 4 ) * size) - size + 1;
int height = ( 7 * size ) + headingGap;
if ( width < headerWidth ) width = headerWidth;
int tempWidth = 10 * size;
int tempInt = temperature;
if (tempInt > 9) {
tempWidth = 16 * size;
}
if (tempInt > 99) {
tempWidth = 21 * size;
}
display.setCursor( ( ( width - headerWidth ) / 2) + x + 1, y );
display.setTextSize( 1 );
display.println( "Temp:" );
display.setTextSize( size );
display.setCursor( ( ( width - tempWidth ) / 2 ) + x + 1, y + headingGap );
String depthString = String( tempInt );
depthString.replace( '0', 'O' );
if ( ferinheight ) {
depthString += String( 'F' );
}
else {
depthString += String( 'C' );
}
display.print( depthString );
if ( bold ) {
display.setCursor( ( ( ( width - tempWidth ) / 2 ) + x) + 2, y + headingGap );
display.print( depthString );
}
#ifdef SHOW_LAYOUT
display.drawRect( x, y, width, height, WHITE );
#endif
}
// ****************************************************************************
// Draw Battery
// ****************************************************************************
void drawBattery( int x, int y, float width, boolean color ) { // if color = false, battey is white, true = black battery.
uint16_t colorValue = WHITE;
if ( color ) colorValue = BLACK;
if ( batteryLevel < 64 ) {
if ( batteryBlink ) {
colorValue = BLACK;
if ( color ) colorValue = WHITE;
batteryBlink = false;
}
else {
batteryBlink = true;
}
}
int levelWidth = ( width / 255.0f ) * batteryLevel;
display.drawRect( x, y, width, 7, colorValue );
display.fillRect( x + 1, y + 1, levelWidth - 2, 5, colorValue );
display.drawLine( x + width, y + 2, x + width, y + 4, colorValue );
}
// ****************************************************************************
// Draw Time Temp Bar
// ****************************************************************************
// Bar has a fixed height of 9 pixels.
void drawTimeTempBar( int x, int y, int w, boolean showBattery ) {
// Draw Bar
display.fillRect( x, y, w, 9, WHITE );
// DrawTime
display.setTextColor( BLACK );
display.setTextSize( 1 );
int tempInt = temperature;
display.setCursor( x + 1, y + 1 );
String timeString = createTimeString( true );
int timeWidth = ( timeString.length() * 6 ) - 1;
display.print( timeString );
// Draw Temp
String tempString = String( tempInt );
tempString.replace( '0', 'O' );
if (ferinheight ) {
tempString += String( " F" );
}
else {
tempString += String( " C" );
}
int tempWidth = ( tempString.length() * 6 ) - 1;
display.setCursor( x + w - tempWidth - 1, y + 1 );
display.print(tempString);
display.setCursor( ( x + w - 13 ), y - 1 );
display.write(9);
// Draw Battery
if (showBattery) {
int batteryWidth = w - ( timeWidth + tempWidth + 16);
drawBattery( x + timeWidth + 8, y + 1, batteryWidth, true);
}
}
// ****************************************************************************
// Draw Depth
// ****************************************************************************
// Good up to three digits. Sizes 1-4 are valid
void drawDepth(int value, int x, int y, int headingGap, int size, boolean bold, String header) {
int headerLength = header.length();
int headerWidth = ( 6 * headerLength);
int width = ( ( 6 * 3 ) * size) - size + 1;
int height = (7 * size) + headingGap;
if ( width < headerWidth ) width = headerWidth;
int depthWidth = 5 * size;
if (value > 9) {
depthWidth = 11 * size;
}
if (value > 99) {
depthWidth = 17 * size;
}
display.setCursor( ( ( width - headerWidth ) / 2) + x + 1, y );
display.setTextSize(1);
display.println(header);
display.setTextSize(size);
display.setCursor( ( ( width - depthWidth ) / 2 ) + x + 1, y + headingGap);
String depthString = String(value);
depthString.replace( '0', 'O' );
display.print(depthString);
if ( bold ) {
display.setCursor( ( ( ( width - depthWidth ) / 2 ) + x) + 2, y + headingGap );
display.print( depthString );
}
#ifdef SHOW_LAYOUT
display.drawRect( x, y, width, height, WHITE );
#endif
}
// ****************************************************************************
// Draw Accent Rate
// ****************************************************************************
void calculateAccentRate() {
int samples = accentSamples;
int pointer = depthsPointer;
unsigned long totalTime = 0;
unsigned long lastTime = 0;
float totalDepth = 0;
float lastDepth = 0;
for ( int x = 0; x < accentSamples; x++ ) {
if ( depthMicros[ pointer ] == 0 ) {
samples--;
}
else {
if ( lastTime == 0.0 ) {
lastTime = depthMicros[ pointer ];
}
else {
totalTime += ( depthMicros[ pointer ] - lastTime ) ;
lastTime = depthMicros[ pointer ];
}
if ( lastDepth == 0.0 ) {
lastDepth = depths[ pointer ];
}
else {
totalDepth += ( lastDepth - depths[ pointer ] );
lastDepth = depths[ pointer ];
}
}
pointer++;
if ( pointer > accentSamples ) pointer = 0;
}
if (samples == 0) {
accentRate = 0;
digitalWrite(alertLEDPin, HIGH);
return;
}
accentRate = (totalDepth / ( totalTime / 1000000.0f ) ) * 60.0;
int accentRateMultiplier = 1;
if ( depth > 130 && doubleAccentBelowRec ) accentRateMultiplier = 2;
// Activate LED and play tone
if ( accentRate > ( 30.0 * accentRateMultiplier ) ) {
if ( diveMode ) {
digitalWrite( alertLEDPin, LOW );
if ( !toneActive ) {
if ( playAccentTooFastTone ) {
tonePlaying = 0;
toneActive = true;
}
}
}
}
else {
digitalWrite( alertLEDPin, HIGH );
}
}
void drawAccentRate(int x, int y, int textSize, boolean background, boolean black) {
uint8_t color = WHITE;
if ( black ) color = BLACK;
if ( background ) {
display.fillRect( x, y, 49, 9, WHITE );
}
display.setCursor( x + 1, y + 1 );
display.setTextColor( color );
display.setTextSize( textSize );
if ( accentRate < 10.0 && accentRate > -10.0 ) {
display.print( " " );
}
if ( accentRate < 100.0 && accentRate > -100.0 ) {
display.print( " " );
}
if ( accentRate < 1.0 && accentRate > -1.0 ) {
display.print( " " );
}
else if (accentRate > 0.0 ) {
display.print( "+" );
}
int accentInt = accentRate;
String accentString = String( accentInt );
accentString.replace( '0', 'O' );
display.print( accentString );
display.print( "ft/m" );
}
void drawAccentRateArrows(int x, int y) {
int accentRateMultiplier = 1;
if ( depth > 130 && doubleAccentBelowRec ) accentRateMultiplier = 2;
uint16_t colorValue = WHITE;
if ( accentRate > ( 30 * accentRateMultiplier ) ) {
if ( accentBlink ) {
colorValue = BLACK;
accentBlink = false;
}
else {
accentBlink = true;
}
display.drawBitmap( x, y, up_arrow, 8, 4, colorValue );
}
if ( accentRate > ( 24 * accentRateMultiplier ) ) {
display.drawBitmap( x, y + 4, up_arrow, 8, 4, colorValue );
}
if ( accentRate > ( 18 * accentRateMultiplier ) ) {
display.drawBitmap( x, y + 8, up_arrow, 8, 4, colorValue );
}
if ( accentRate > ( 12 * accentRateMultiplier ) ) {
display.drawBitmap( x, y + 12, up_arrow, 8, 4, colorValue );
}
if ( accentRate > ( 6 * accentRateMultiplier ) ) {
display.drawBitmap( x, y + 16, up_arrow, 8, 4, colorValue );
}
if ( accentRate > 0) {
display.drawBitmap( x, y + 20, up_arrow, 8, 4, colorValue );
}
}
void drawAccentRateBars(int x, int y) {
int accentRateMultiplier = 1;
if ( depth > 130 && doubleAccentBelowRec ) accentRateMultiplier = 2;
uint16_t colorValue = WHITE;
if ( accentRate > ( 30 * accentRateMultiplier ) ) {
if ( accentBlink ) {
colorValue = BLACK;
accentBlink = false;
}
else {
accentBlink = true;
}
display.fillRect( x + 40, y, 7, 20, colorValue );
}
if (accentRate > ( 24 * accentRateMultiplier) ) {
display.fillRect( x + 32, y + 8, 7, 12, colorValue );
}
if (accentRate > ( 18 * accentRateMultiplier) ) {
display.fillRect( x + 24, y + 12, 7, 8, colorValue );
}
if (accentRate > ( 12 * accentRateMultiplier) ) {
display.fillRect( x + 16, y + 16, 7, 4, colorValue );
}
if (accentRate > ( 6 * accentRateMultiplier) ) {
display.fillRect( x + 8, y + 18, 7, 2, colorValue );
}
if (accentRate > 0) {
display.fillRect( x, y + 19, 7, 1, colorValue );
}
}
// ****************************************************************************
// Utility Methods
// ****************************************************************************
String secondsToString( unsigned long diveSeconds ) {
int minutes = diveSeconds / 60;
int seconds = diveSeconds % 60;
// In case of overflow
if (minutes > 99) minutes = minutes % 99;
String timeString;
if ( minutes < 10 ) {
timeString = String( '0' );
timeString = String( timeString + minutes );
}
else {
timeString = String( minutes );
}
timeString = String( timeString + ':' );
if ( seconds < 10 ) {
timeString = String( timeString + '0' + seconds );
}
else {
timeString = String( timeString + seconds );
}
timeString.replace( '0', 'O' );
return timeString;
}
void showAlert(int time, String message) { // time = 0 will ask the user to dismiss. Time is in seconds
if ( !alertShowing ) {
alertShowing = true;
alertTime = now();
display.clearDisplay();
display.display();
digitalWrite( alertLEDPin, LOW );
display.setTextColor( WHITE );
display.setTextSize( 1 );
display.setCursor( 0, 20 );
display.print( message );
if (time == 0) {
display.fillRect( 115, 55, 13, 9, WHITE );
display.setTextColor( BLACK );
display.setCursor( 116, 56 );
display.setTextSize( 1 );
display.println( "OK" );
}
clockBlink = false;
if ( clockBlink ) {
display.fillRect( 0, 0, 128, 18, BLACK );
display.setTextColor( WHITE );
display.setCursor( 35, 2 );
display.setTextSize( 2 );
display.println( "ALERT:" );
}
else {
display.fillRect( 0, 0, 128, 18, WHITE );
display.setTextColor( BLACK );
display.setCursor( 35, 2 );
display.setTextSize( 2 );
display.println( "ALERT:" );
}
display.display();
}
PITimer1.period( 1 );
PITimer1.start( blinkAlert );
if ( time > 0 ) {
PITimer2.period( time );
PITimer2.start( killAlert );
}
}
void killAlert() {
alertShowing = false;
digitalWrite( alertLEDPin, HIGH );
PITimer1.stop();
PITimer2.stop();
display.clearDisplay();
display.display();
}
void blinkAlert() {
//PITimer1.clear();
if ( now() > lastColonStateChange ) {
lastColonStateChange = now();
clockBlink = !clockBlink;
}
if (clockBlink) {
display.fillRect( 0, 0, 128, 18, BLACK );
display.setTextColor( WHITE );
display.setCursor( 35, 2 );
display.setTextSize( 2 );
display.println( "ALERT:" );
}
else {
display.fillRect( 0, 0, 128, 18, WHITE );
display.setTextColor( BLACK );
display.setCursor( 35, 2 );
display.setTextSize( 2 );
display.println( "ALERT:" );
}
display.display();
}
// ****************************************************************************
// MS5803 Sensor Methods
// ****************************************************************************
// Sends a power on reset command to the sensor. Should be done at powerup and maybe on a periodic basis (needs to confirm with testing).
void ms5803_reset_sensor() {
digitalWrite( sensorSelectPin, LOW );
SPI.setDataMode( SPI_MODE3 );
SPI.transfer( SENSOR_CMD_RESET );
delay( 10 );
digitalWrite( sensorSelectPin, HIGH );
delay( 5 );
}
// These sensors have coefficient values stored in ROM that are used to convert the raw temp/pressure data into degrees and mbars.
// This method reads the coefficient at the index value passed. Valid values are 0-7. See datasheet for more info.
unsigned int ms5803_read_coefficient(uint8_t index) {
unsigned int result = 0; // result to return
digitalWrite( sensorSelectPin, LOW );
SPI.setDataMode( SPI_MODE3 );
// send the device the coefficient you want to read:
SPI.transfer( 0xA0 + ( index * 2 ) );
// send a value of 0 to read the first byte returned:
result = SPI.transfer( 0x00 );
result = result << 8;
result |= SPI.transfer( 0x00 ); // and the second byte
// take the chip select high to de-select:
digitalWrite( sensorSelectPin, HIGH );
//Serial.println (result);
return( result );
}
// Coefficient at index 7 is a four bit CRC value for verifying the validity of the other coefficients.
// The value returned by this method should match the coefficient at index 7. If not there is something works with the sensor or the connection.
unsigned char ms5803_crc4(unsigned int n_prom[]) {
int cnt;
unsigned int n_rem;
unsigned int crc_read;
unsigned char n_bit;
n_rem = 0x00;
crc_read = sensorCoefficients[7];
sensorCoefficients[7] = ( 0xFF00 & ( sensorCoefficients[7] ) );
for (cnt = 0; cnt < 16; cnt++)
{ // choose LSB or MSB
if ( cnt%2 == 1 ) n_rem ^= (unsigned short) ( ( sensorCoefficients[cnt>>1] ) & 0x00FF );
else n_rem ^= (unsigned short) ( sensorCoefficients[cnt>>1] >> 8 );
for ( n_bit = 8; n_bit > 0; n_bit-- )
{
if ( n_rem & ( 0x8000 ) )
{
n_rem = ( n_rem << 1 ) ^ 0x3000;
}
else {
n_rem = ( n_rem << 1 );
}
}
}
n_rem = ( 0x000F & ( n_rem >> 12 ) );// // final 4-bit reminder is CRC code
sensorCoefficients[7] = crc_read; // restore the crc_read to its original place
return ( n_rem ^ 0x00 ); // The calculated CRC should match what the device initally returned.
}
// Use this method to send commands to the sensor. Pretty much just used to read the pressure and temp data.
unsigned long ms5803_cmd_adc(char cmd) {
unsigned int result = 0;
unsigned long returnedData = 0;
digitalWrite( sensorSelectPin, LOW );
SPI.transfer( SENSOR_CMD_ADC_CONV + cmd );
switch ( cmd & 0x0f )
{
case SENSOR_CMD_ADC_256 :
delay( 1 );
break;
case SENSOR_CMD_ADC_512 :
delay( 3 );
break;
case SENSOR_CMD_ADC_1024:
delay( 4 );
break;
case SENSOR_CMD_ADC_2048:
delay( 6 );
break;
case SENSOR_CMD_ADC_4096:
delay( 10 );
break;
}
digitalWrite( sensorSelectPin, HIGH );
delay(3);
digitalWrite( sensorSelectPin, LOW );
SPI.transfer( SENSOR_CMD_ADC_READ );
returnedData = SPI.transfer( 0x00 );
result = 65536 * returnedData;
returnedData = SPI.transfer( 0x00 );
result = result + 256 * returnedData;
returnedData = SPI.transfer( 0x00 );
result = result + returnedData;
digitalWrite( sensorSelectPin, HIGH );
return result;
}
// ****************************************************************************
// Log Book
// ****************************************************************************
void drawLogBook() {
display.fillRect(0, 0, 128, 9, WHITE);
display.setTextColor(BLACK);
display.setTextSize(1);
display.setCursor(40, 1);
display.print("Log Book");
for (int i = 0; i < 5; i++ ) {
drawLogEntry( 10, i, currentTime, i );
}
drawButtonOptions("^^", ">>", true, true);
}
void drawLogEntry(int y, int listPosition, unsigned long date, int diveNumber) { // Parameters: y is the very top of the list, listPosition is where the line will be drawn relative to y, date is the date/time of the entry and diveNumber is the # for that date.
String text = String( "Mar 28, 2013 Dive #" ); // 20 characters
text += String( diveNumber + 1 );
display.setTextColor( WHITE );
display.setTextSize( 1 );
display.setCursor( 0, y + ( 9 * listPosition ) );
display.print( text );
}
// ****************************************************************************
// Settings
// ****************************************************************************
void drawSettings() {
display.fillRect(0, 0, 128, 9, WHITE);
display.setTextColor(BLACK);
display.setTextSize(1);
display.setCursor(40, 1);
display.print("Settings");
display.setTextColor(WHITE);
display.setCursor(0, 10);
display.print("Under construction");
drawButtonOptions("MENU", ">>", true, false);
}
// ****************************************************************************
// EEPROM Methods
// ****************************************************************************
void readPrefereces() {
int value = EEPROM.read( 0 );
int value2 = EEPROM.read( 1 );
// if the values stored in locations 0 and 1 are not 170, then assume this is a first run.
// Clear the EEPROM and store the 170s to indicate first run has happened.
if (value != 170 || value2 != 170) { // First run...
// Wipe the EEPROM
for (int i = 0; i < 2048; i++ ) { // The Teensy has 2K of EEPROM
EEPROM.write( i, 0 );
}
EEPROM.write( 0, 170 );
EEPROM.write( 1, 170 );
// Write the default preference.
writePreferences();
}
else { // Not a first run...
// read preferences
time12Hour = EEPROM.read( 2 ); // true = 12 hour time, false = 24 hour time.
clockBlink = EEPROM.read( 3 ); // true = blink the colon, false = don't blink the colon.
ferinheight = EEPROM.read( 4 ); // true = Ferinheight, false = Celsius.
meters = EEPROM.read( 5 ); // true = meters, false = feet.
doubleAccentBelowRec = EEPROM.read( 6 ); // True = 60ft/min accent rate below recreational limits (130ft). 30ft/min otherwise.
recordInterval = EEPROM.read( 7 ); // This is the inteval in which it will record data to the SD card in minutes.
profileInterval = EEPROM.read( 8 ); // The interval that dive profile depths are recorded to EEPROM (for the graphing funtion).
playAccentTooFastTone = EEPROM.read( 9 ); // Determines if the accent rate tone is played.
}
}
void writePreferences() {
EEPROM.write( 2, time12Hour );
EEPROM.write( 3, clockBlink );
EEPROM.write( 4, ferinheight );
EEPROM.write( 5, meters );
EEPROM.write( 6, doubleAccentBelowRec );
EEPROM.write( 7, recordInterval );
EEPROM.write( 8, profileInterval );
EEPROM.write( 9, playAccentTooFastTone );
}
// ****************************************************************************
// Dive Profile Methods
// ****************************************************************************
// TODO: Fix this so that it saves an integer (uint_16) not a byte (uint_8). This will allow it to exceed 255 feet for those crazy enough to go that deep.
void recordDiveProfileValue() {
if ( now() > ( lastProfileRecord + profileInterval ) ) {
lastProfileRecord = now();
byte profileDepth = depth;
int pointer = 2047 - profileSize + profilePointer; // Put the profile at the end of the EEPROM.
EEPROM.write( pointer, profileDepth );
profilePointer++;
profileSamples++;
if ( profilePointer > profileSize ) profilePointer = 0;
if ( profileSamples > profileSize ) profileSamples = profileSize;
}
}
void clearDiveProfile() {
byte profileDepth = 0;
int pointer = 0;
for (int x = 0; x < profileSize; x++) {
pointer = ( 2047 - profileSize ) + x;
EEPROM.write( x, profileDepth );
}
profilePointer = 0;
profileSamples = 0;
}
// Graph has a fixed size of 100 pixels wide and 50 pixles high.
void drawDiveProfileGraph(int x, int y) {
int maxRange = ( maxDepth / 10 ) + 1;
maxRange = maxRange * 10;
float multiplier = 50.0f / maxRange;
float yVal = 0.0f;
int yInt = 0;
int pointer = ( 2047 - profileSize ) + profilePointer - 1;
int storedValue = 0;
float storedFloat = 0.0f;
for ( int c = 0; c < profileSamples; c++ ) {
storedValue = EEPROM.read( pointer );
storedFloat = storedValue;
yVal = ( storedFloat * multiplier ) * 1.0f;
yInt = yVal;
display.drawPixel( ( x + profileSize ) - c, yInt, WHITE);
pointer--;
if ( pointer < (2047 - profileSize) ) pointer = 2047;
}
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor (x + 2, y + 43);
display.print(maxRange);
display.drawLine(x, y + 51, x + profileSize, y + 51, WHITE);
display.drawLine(x, y, x, y + 51, WHITE);
}
void cycleTone() {
noTone( speakerPin );
if ( !toneActive ) return;
int numberOfTones = 0;
if ( tonePlaying == 0 ) numberOfTones = accent_tone[ 0 ];
if ( tonePlaying == 1 ) numberOfTones = trill_tone[ 0 ];
if ( toneCounter > numberOfTones - 1 ) {
toneCounter = 0;
toneActive = false;
return;
}
toneCounter++;
if ( tonePlaying == 0 ) tone( speakerPin, accent_tone[ toneCounter ] );
if ( tonePlaying == 1 ) tone( speakerPin, trill_tone[ toneCounter ] );
}
// ****************************************************************************
// Safety Stop Methods
// ****************************************************************************
void drawSafetyStopScreen() {
uint16_t textColorValue = WHITE;
uint16_t barColorValue = BLACK;
if ( now() > safetyStopBlink ) {
safetyStopBlink = now();
safetyStopBlinkState = !safetyStopBlinkState;
}
if ( safetyStopBlinkState ) {
textColorValue = BLACK;
barColorValue = WHITE;
}
display.fillRect( 0, 0, 128, 9, barColorValue );
display.setTextColor( textColorValue );
display.setCursor( 31, 1 );
display.setTextSize( 1 );
display.println( "SAFETY STOP" );
display.setTextColor( WHITE );
drawDiveTime( ( safetyStopTime - now() ), 60, 10, 9, 2, false, "Stop Time:" ); // Parameters: Time in seconds, x, y, size, bold
drawDepth( depth, 6, 16, 9, 3, true, "Depth:" ); // Parameters: depth, x, y, size, bold, header string
drawAccentRateBars( 71, 34 );
drawSaturation( nitrogen, true );
drawSaturation( oxygen, false );
drawButtonOptions( "^^", ">>", true, true );
}
// ****************************************************************************
// Methods
// ****************************************************************************
| Reference | URL |
|---|---|
| Tutorial: Using an MS5803 pressure sensor with Arduino | https://thecavepearlproject.org/2014/03/27/adding-a-ms5803-02-high-resolution-pressure-sensor/ |
| Fundamentals of Pressure Sensor Technology | https://www.fierceelectronics.com/components/fundamentals-pressure-sensor-technology |
| SparkFun Pressure Sensor Breakout | https://www.sparkfun.com/products/12909 |
| DIY-Dive-Computer/DIY-Dive-Computer (CODE) | https://github.com/DIY-Dive-Computer/DIY-Dive-Computer/blob/v0.1/Dive_Computer_Code/Dive_Computer_Code.ino |
- No labels