Interrupts
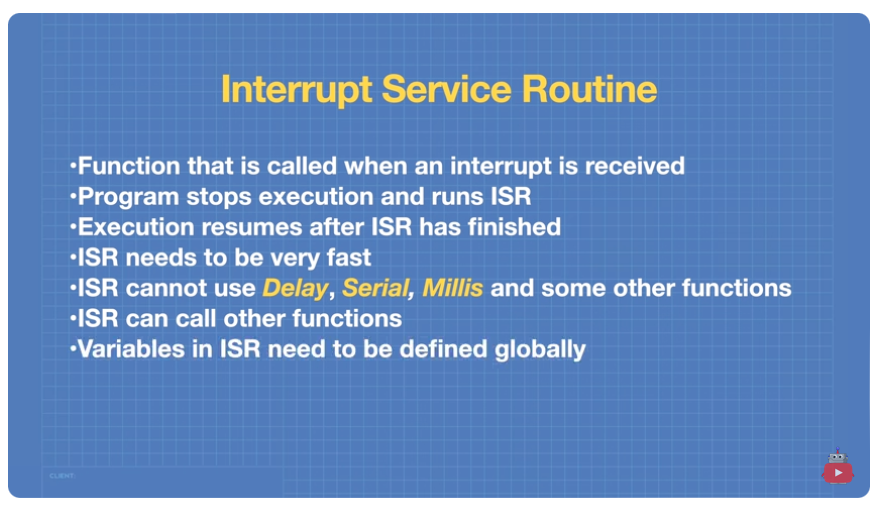
Interrupt Code Sample
Sample Code to to toggle an LED when a button triggers an interrupt.
//Define LED and switch connections
const byte ledPin = 13;
const byte buttonPin = 2;
// Boolean to represent toggle state
volatile bool toggleState = false;
void checkSwitch@) {
//Check status of switch
// Toggle LED if button pressed
if (digitalRead(buttonPin) == LOW) {
// Switch was pressed
// Change state of toggle
toggleState = !toggleState;
// Indicate state on LED
digitalWrite(ledPin, toggleState);
}
}
void setup() {
//Set LED pin as output
pinMode(ledPin, OUTPUT) ;
// Set switch pin as INPUT with pullup
pinMode (buttonPin, INPUT_PULLUP) ;
//Setup Serial Monitor
Serial. begin (9600);
// Attach Interrupt to Interrupt Service Routine
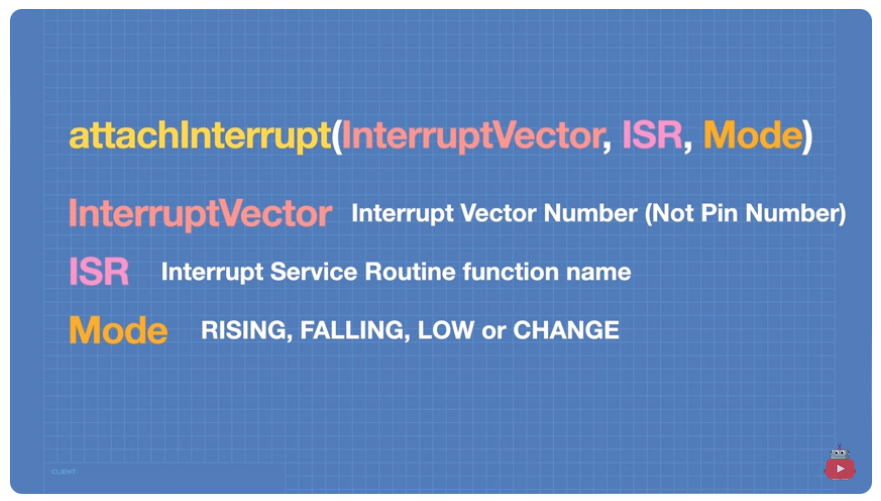
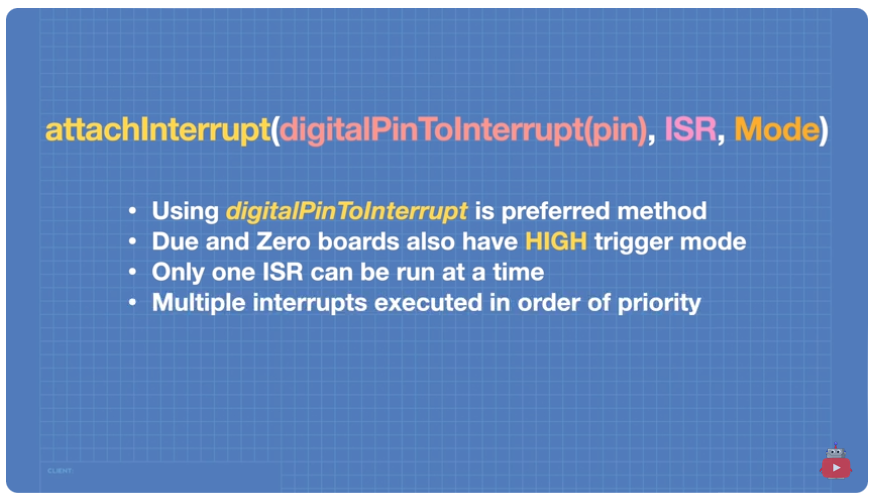
attachInterrupt(digitalPinToInterrupt(buttonPin),checkSwitch, FALLING);
}
void loop() {
// 5-second time delay
Serial.println("Delay Started");
delay (5000);
Serial.println("Delay Finished");
Serial.println(".......
}
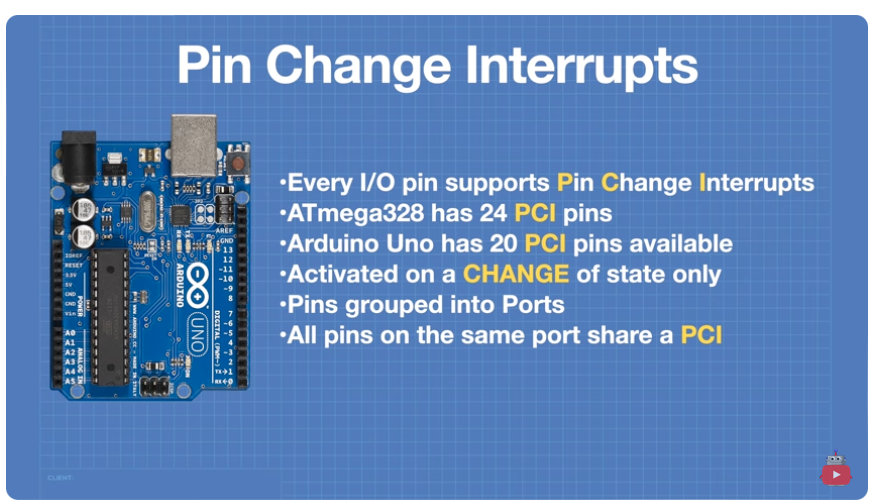
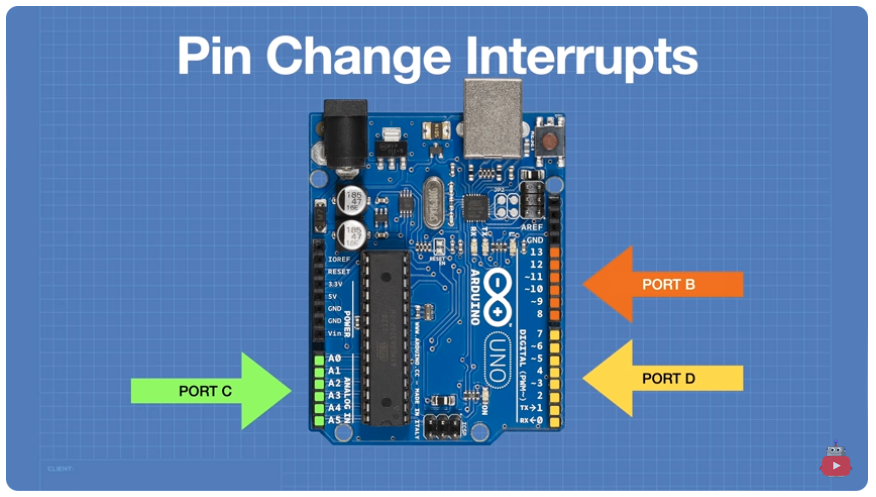
Pin Change Interrupts
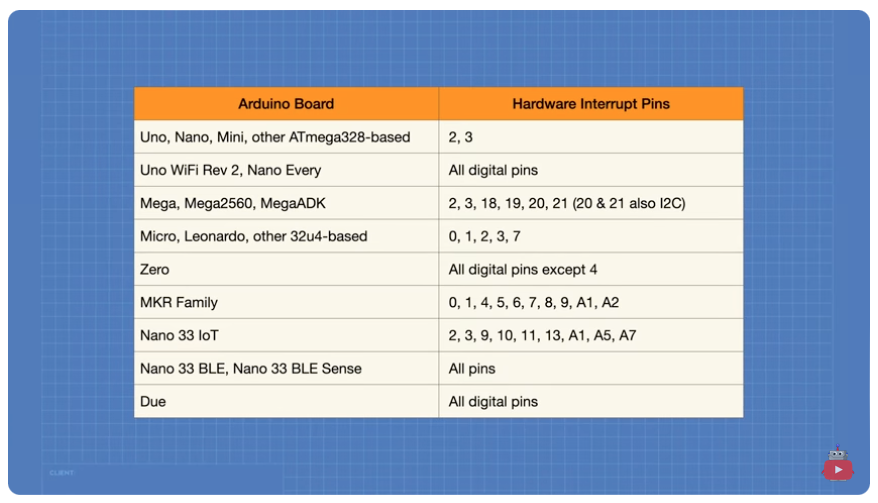
Arduino microcontrollers have a limited number of pins that are hardware interrupt compatible.
To get around this limitation, we can use a pin change interrupts on almost all pins.
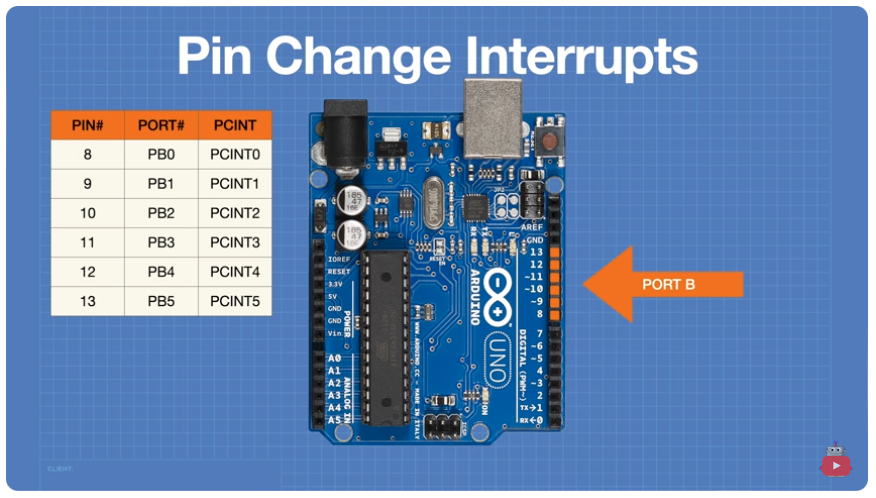
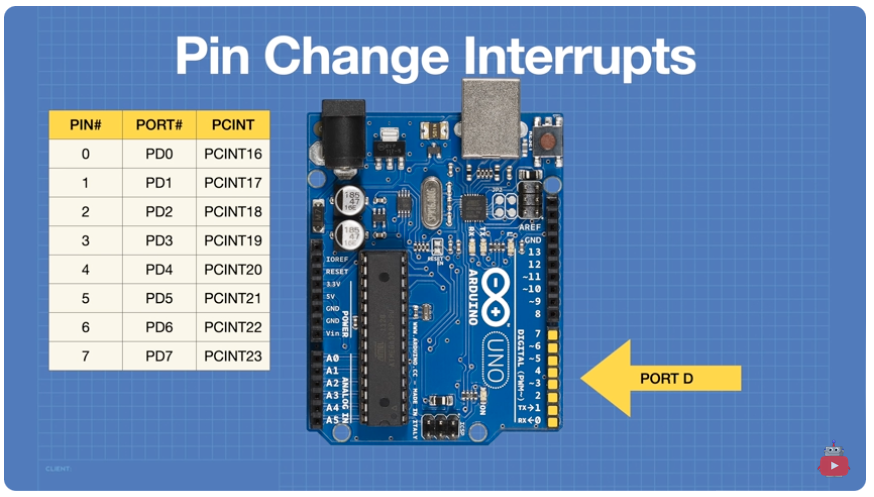
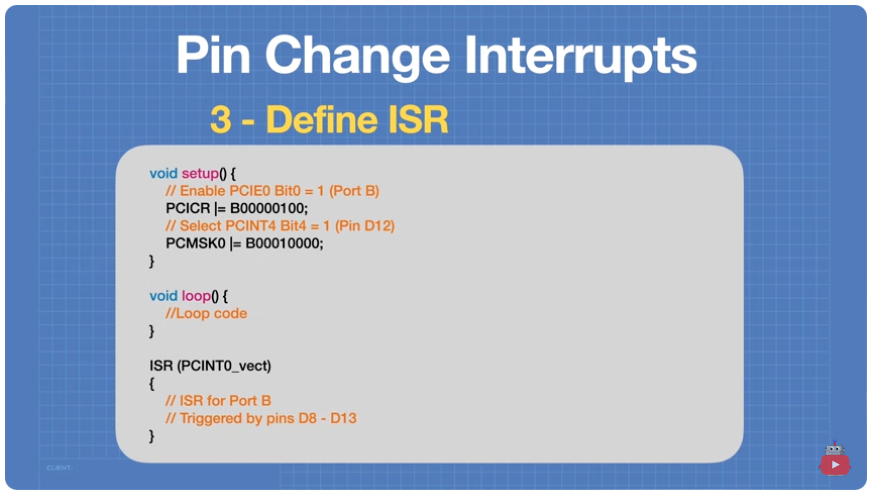
Enable Port B
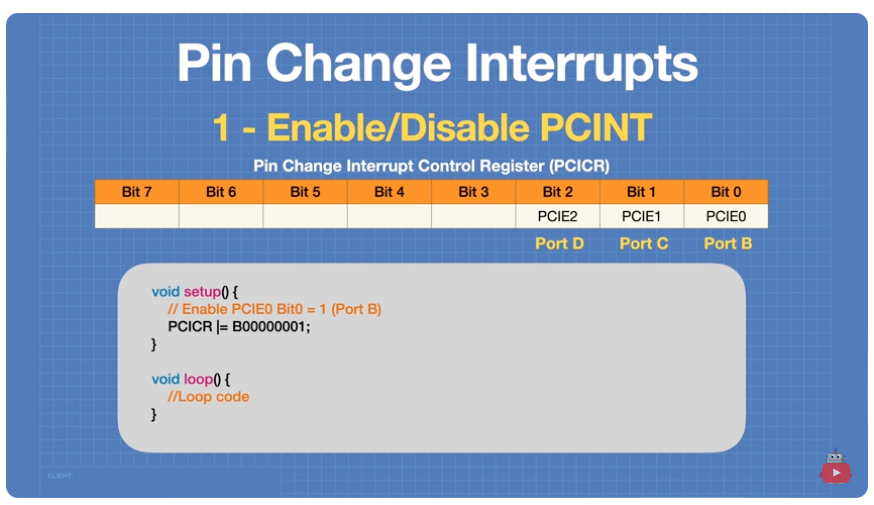
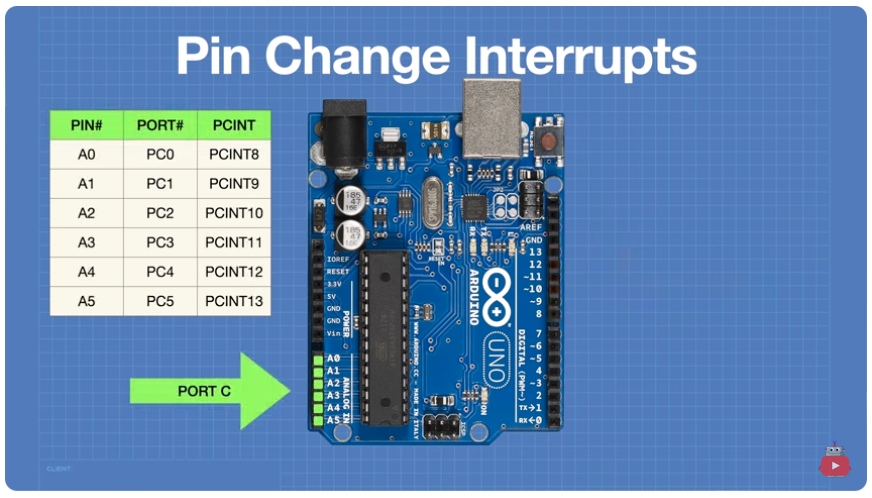
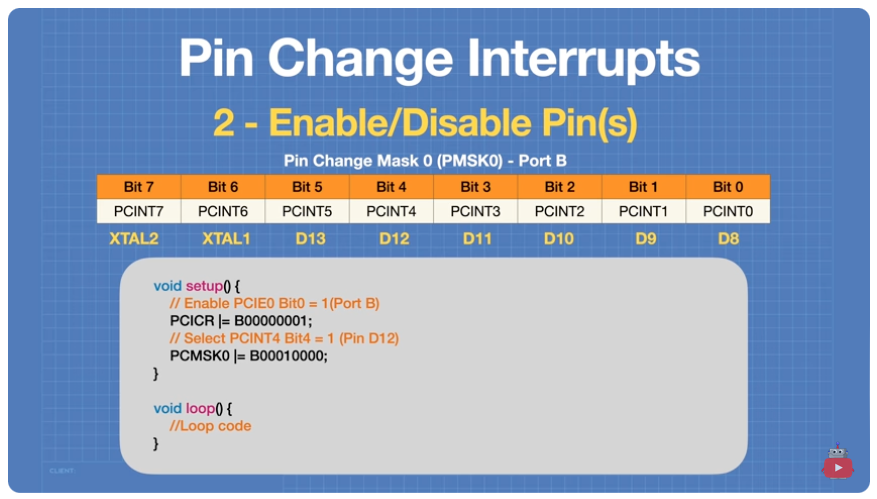
Each port has a mask to enable particular pins.
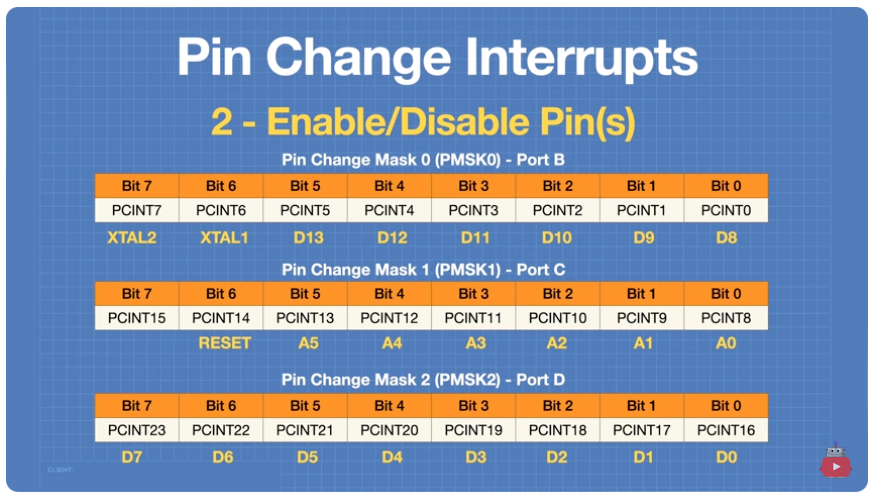
Activate Pin D12 on Port B
Interrupt Service Routines are pre-defined for each port
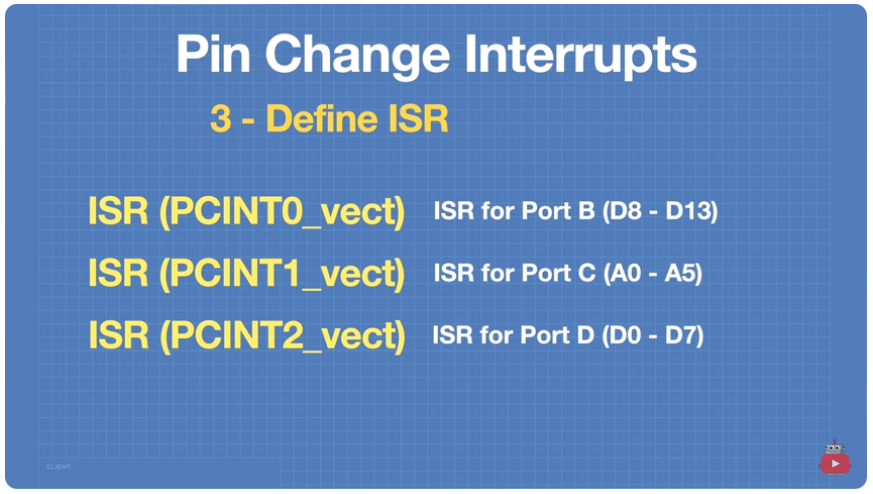
Define the ISR
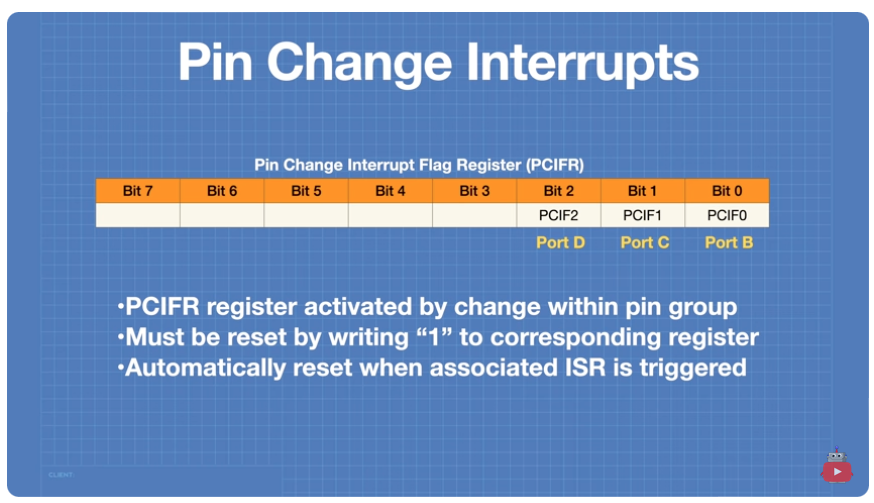
We must rest the interrupt by writing a "1" to the corresponding bit of the PCIFR register. This is not required when using an ISR.
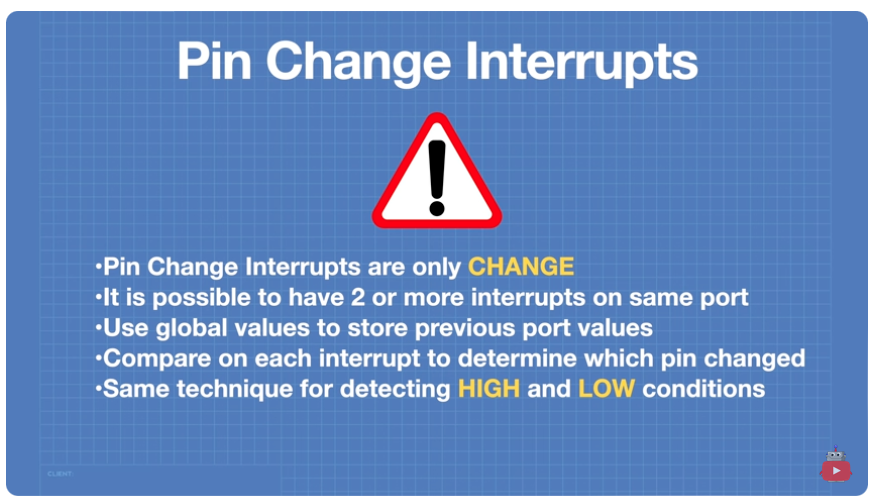
Note about Pin Change Interrupts
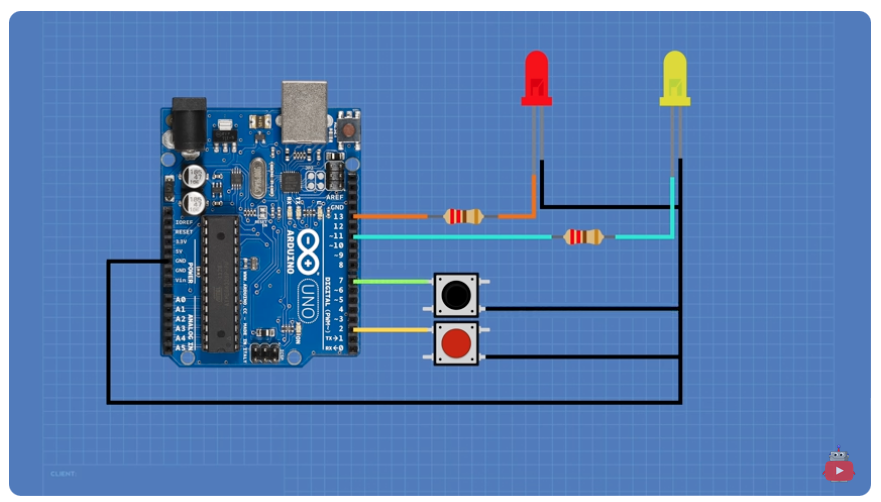
Circuit for Example Pin Change Interrupt
Sample Code
// LEDs and switchs
const byte ledPin1 = 11;
const byte ledPin2 = 13;
const byte buttonPin1= 2;
const byte buttonPin2 = 7;
// Booleans for input states
volatile bool D2_state = LOW;
volatile bool D7_state = LOW;
void setup() {
// Set LEDs as output
pinMode(ledPin1, OUTPUT) ;
pinMode(ledPin2, OUTPUT) ;
// Set Switches as input with pullup
pinMode(buttonPin1, INPUT_PULLUP) ;
pinMode(buttonPin2, INPUT_PULLUP) ;
// Enable PCIE2 Bit3 = 1 (Port D)|
PCICR |= 800000100;
//Enable interrupt on Pin D2 & D7 - Select PCINT18 & PCINT23 (Pin D2 & D7)
PCMSK2 |= B10000100;
}
void loop(){
// No code in Loop
}
ISR (PCINT2_vect)
{
// Port D Interrupt occured
// Check if this was D2
if (digitalRead(buttonPin1) == LOW) {
//Pin D2 triggered the ISR on a Falling pulse
D2_state = !D2_state;
//Set LED 1 to state of D2 state boolean
digitalWrite(ledPin1, D2_state);
}
// Check if this was D7
if (digitalRead(buttonPin2) == LOW) {
//Pin D7 triggered the ISR on a Falling pulse
D7_state = !D7_state;
//Set LED 2 to state of D7_state boolean
digitalWrite(ledPin2, D7_state);
}
}
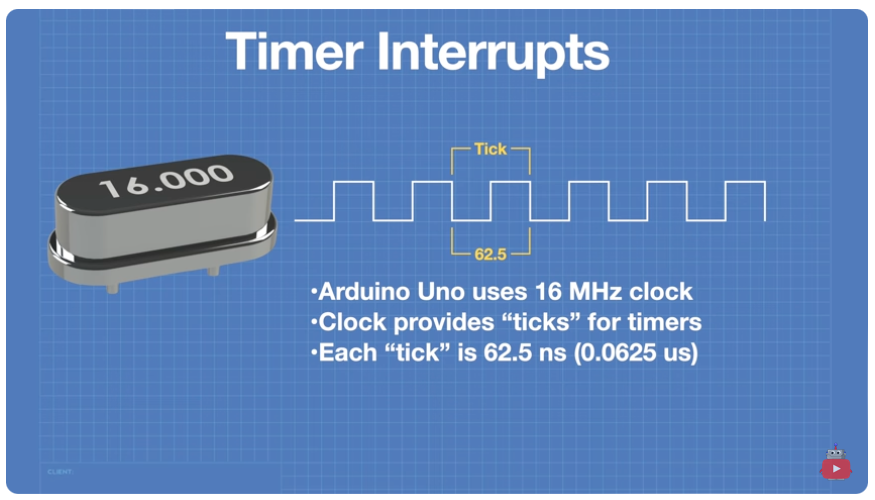
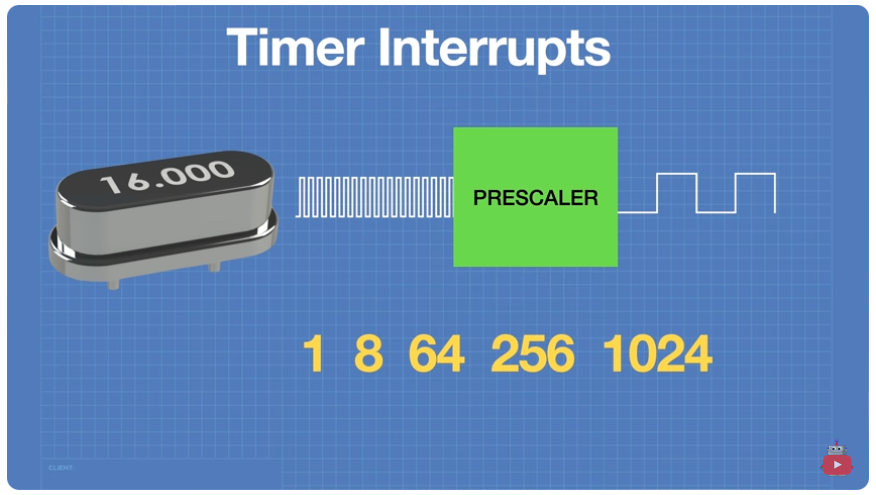
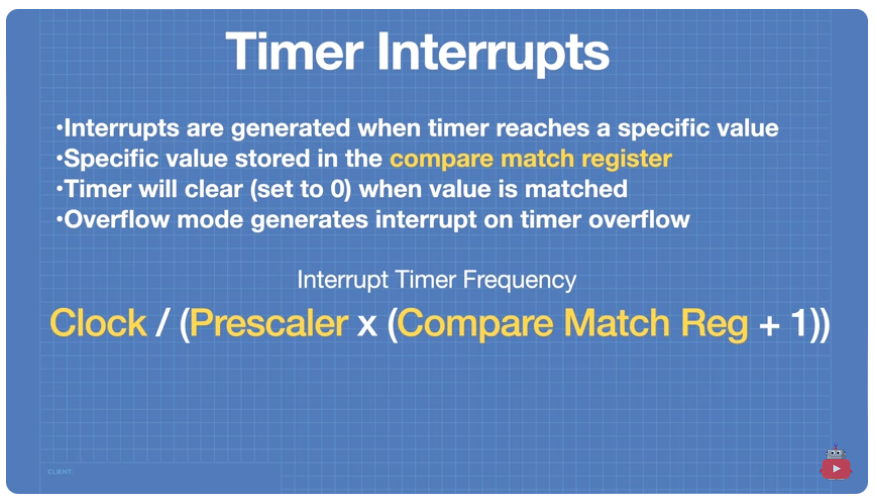
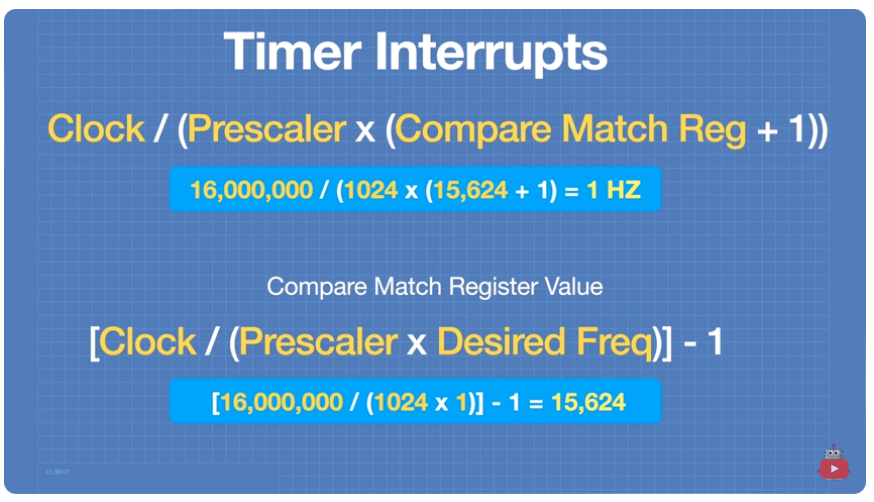
Timer Interrupts
Do not use a timer that is used by another process.
Arduino Uno Timers
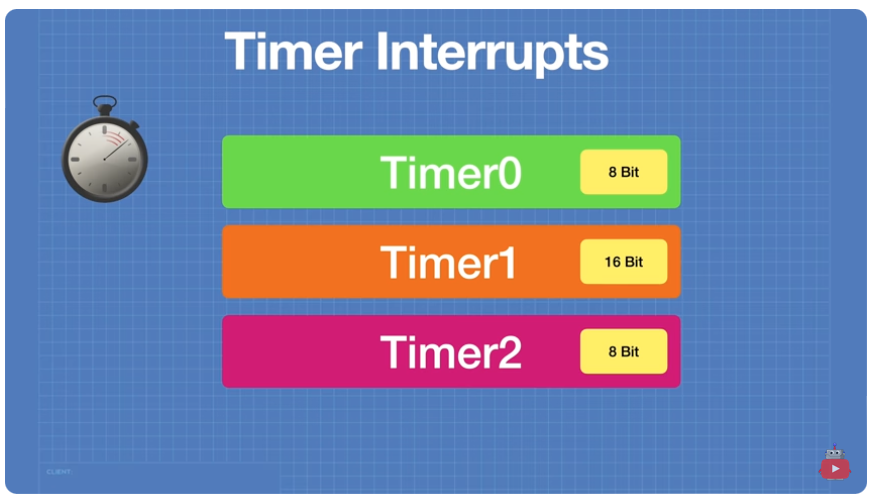
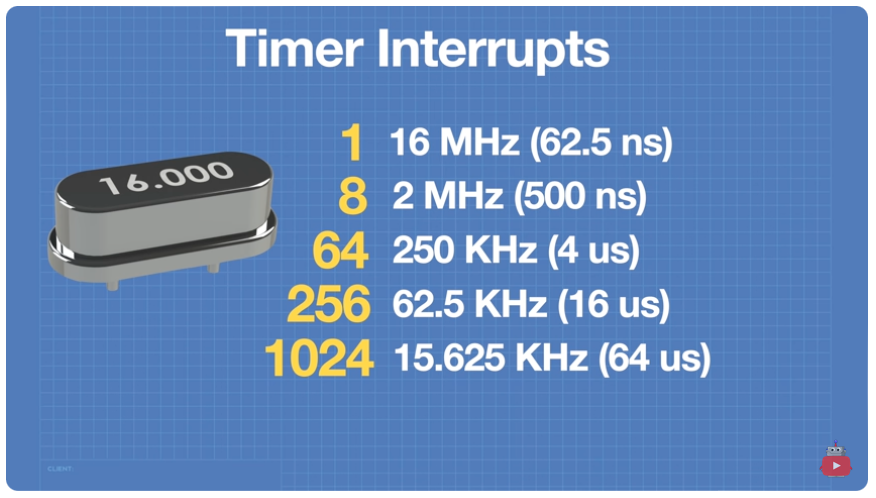
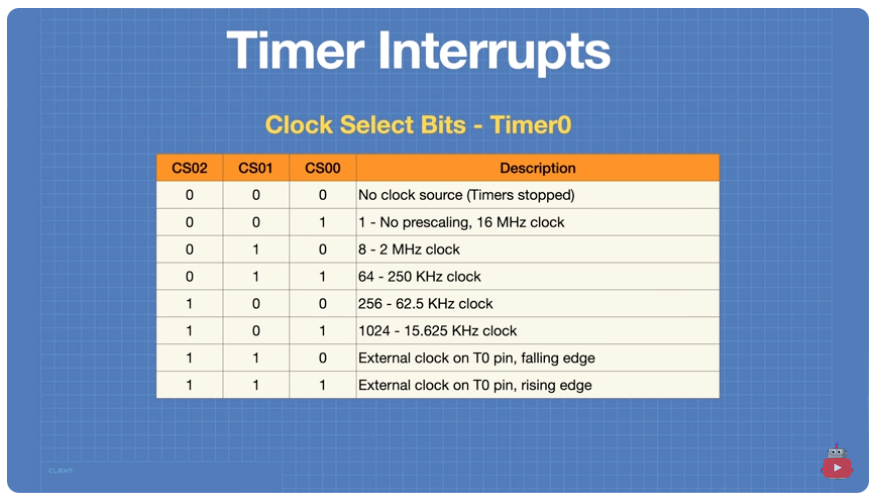
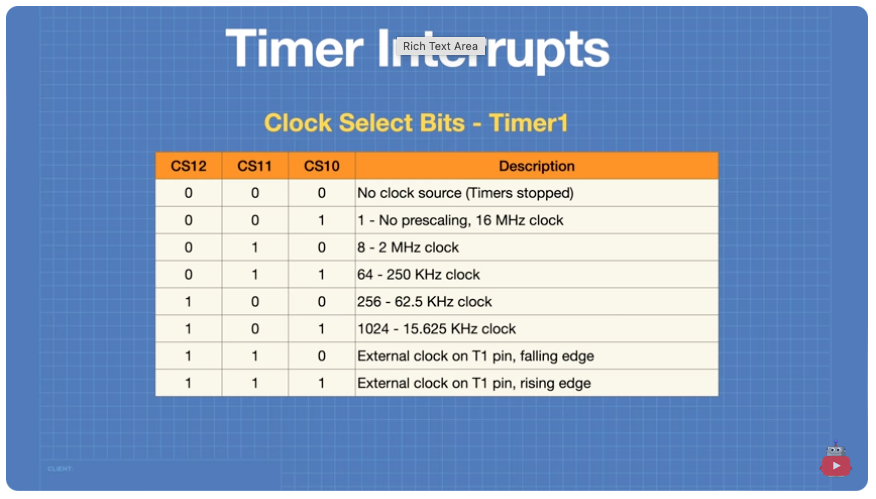
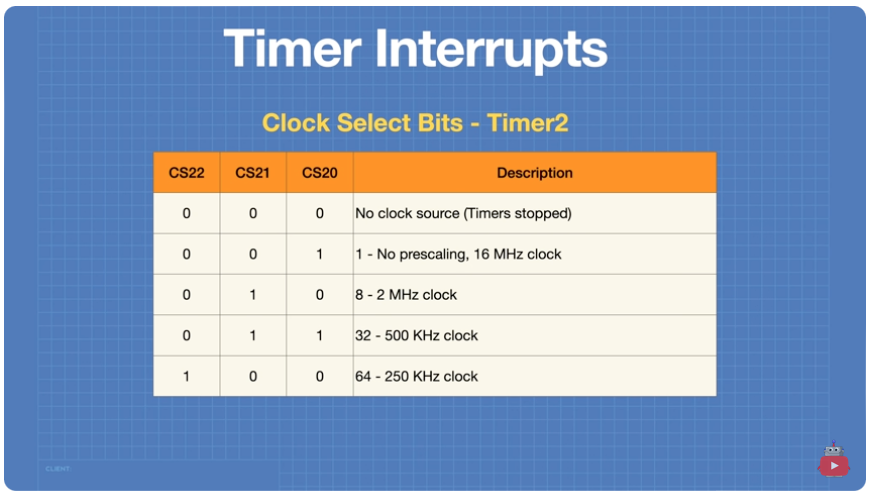
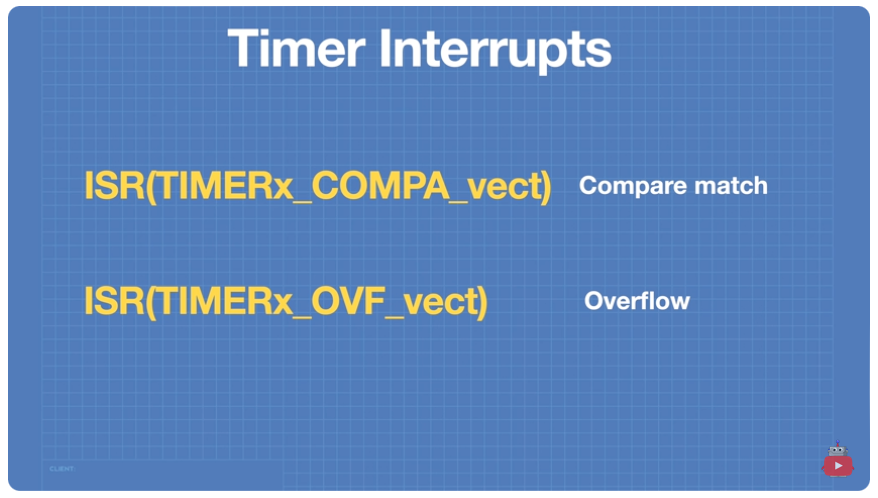
Replace x with 0,1, or 2 representing the timer #.
Code Sample
//define the LED pin
#define ledPin 13
//Define timer compare match register value
int timer1_compare_match;
ISR(TIMER1_COMPA_vect){
//Interrupt Service Routine for Compare Mode
//Preload timer with compare match value
TCNT1 = timer_compare_match;
//Write opposite value to LED
digitalWrite(ledPin, digitalRead(ledPin) ^ 1);
}
void setup(){
//Set LED as output
pinMode(ledPin, OUTPUT);
//Disable all interrupts
noInterrupts();
//Initialize Timer1
TCCR1A = 0;
TCCR1B = 0;
//Set timerl_compare_match to the correct compare match register value
// 256 prescaler & 31246 compare match = 2Hz
timer_compare_match = 31249;
//Preload timer with compare match value
TCNT1 = timer1_compare_match;
// Preload timer with compare match value
TCNT1 = timer1_compare_match;
// Set prescaler to 256 - set CS12 bit in TCCR1B
TCCR1B = (1 < CS12) ;
// Enable timer interrupt for compare mode
TIMSK1 |= (1 < OCIE1A);
// Enable all interrupts
interrupts ();
}
void loop() {
//nothing
}
Analyzing the Following Code
static uint8_t saveTCCR1A, saveTCCR1B;
static inline void capture_init(void)
{
saveTCCR1A = TCCR1A;
saveTCCR1B = TCCR1B;
//reset TimerCounter 1
TCCR1B = 0;
TCCR1A = 0;
TCNT1 = 0;
TIFR1 = (1<<ICF1) | (1<<TOV1);
TIMSK1 = (1<<ICIE1) | (1<<TOIE1);
}
static inline void capture_start(void)
{
TCCR1B = (1<<ICNC1) | (1<<ICES1) | (1<<CS10);
}
static inline uint16_t capture_read(void)
{
return ICR1;
}
static inline uint8_t capture_overflow(void)
{
return TIFR1 & (1<<TOV1);
}
static inline void capture_overflow_reset(void)
{
TIFR1 = (1<<TOV1);
}
static inline void capture_shutdown(void)
{
TCCR1B = 0;
TIMSK1 = 0;
TCCR1A = saveTCCR1A;
TCCR1B = saveTCCR1B;
}
#define TIMER_OVERFLOW_VECTOR TIMER1_OVF_vect
#define TIMER_CAPTURE_VECTOR TIMER1_CAPT_vect
References
| Reference | URL |
|---|---|
| Understanding Arduino Interrupts | Hardware, Pin Change & Timer Interrupts | Video: https://www.youtube.com/watch?v=wIcC8-g9Lnw Article with code: https://dronebotworkshop.com/interrupts More articles and tutorials: https://dronebotworkshop.com Join the conversation on the forum: https://forum.dronebotworkshop.com |
| Electronic Basics #30: Microcontroller (Arduino) Timers | https://www.youtube.com/watch?v=IdL0_ZJ7V2s |
| Configuring & Handling ESP32 GPIO Interrupts In Arduino IDE |